-
車用ADAS系統產業概念股
-
數據分析
|
|
|
-
相關分析
ADAS功能及其感測器種類說明
各駕駛輔助系統名稱 |
功能 |
應用的感測器種類 |
停車輔助系統 |
可自動偵測找尋停車位,甚至可接管方向盤將車停入停車位置 |
紅外線雷達、超聲波雷達、毫米波雷達、影像感測器 |
碰撞預防系統 |
警示駕駛者前方異常情況,以避免交通意外發生 |
CCD影像感測器、毫米波雷達/雷射雷達 |
主動車距控制巡航系統 |
定速巡航系統整合雷達測速系統,達到車輛可依導路前方車況自行調整行進時速,以保持安全的行車距離 |
毫米波雷達、方向角感測器、輪速感測器 |
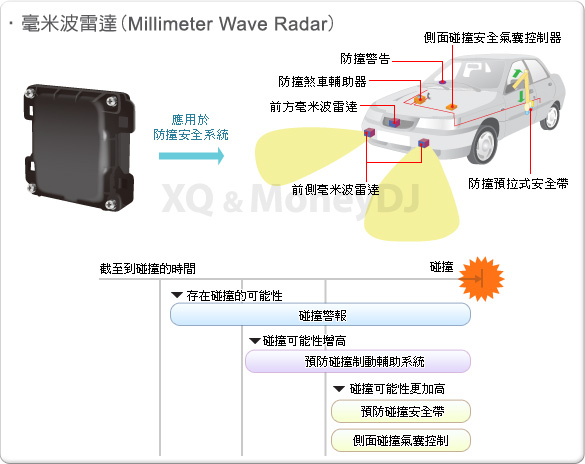
緩解撞擊剎車系統 |
為避免追撞,兩車車距漸近時,會發出警示音及brake。駕駛者如無反應,會自動輕拉安全帶,提醒駕駛者剎車並啟動BA煞車倍力器,若駕駛者仍無反應,將啟動自動煞車,配合安帶緊縮,保護駕駛者安全 |
毫米波雷達 |
夜視系統 |
增加駕駛者在夜晚駕駛的清晰度 |
CCD影像感測器、室溫熱像型攝影機模組、紅外線 |
盲點偵測系統 |
偵測車輛的側面及後方,以亮光或聲音警示驚駛者 |
毫米波雷達、雷射雷達、紅外線雷達 |
偏離車道警示系統 |
主動警示車輛發生車道偏離的情況,警示後,駕駛者仍無採取任何應變措拖時,將自動調整車輛至正常車道位置 |
CCD影像感測器 |
後方碰撞警示系統 |
警示駕駛者後方異常情況,以避免交通意外發生 |
CCD影像感測器、毫米波雷達/雷射雷達 |
適路性車燈系統 |
在方向盤轉動時,主動調整頭燈照射方向到前進方向,補足照明死角 |
影像感測器 |
資料來源:TRI拓墣產業研究所 |
||
各車用雷達性質比較
車用雷達種類 |
紅外線 |
超聲波 |
雷射 |
毫米波 |
最長測量距離 |
最長10m |
最長10m |
最長10m(雷射功率決定) |
最長200m(由波束寬度和接收靈敏度來決定) |
分頻率 |
20mm |
差 |
最小1mm |
10mm |
反應時間 |
受聲速限制 |
慢,一般為10ms |
快,一般為10ms |
快,一般為1ms |
溫度穩定性 |
差 |
一般 |
好 |
好 |
感測器受髒、濕度影響 |
一般 |
差 |
差 |
好 |
惡劣天氣適應性 |
差 |
差 |
差 |
強 |
穿透力 |
強 |
強 |
強 |
差 |
硬體相對價格 |
低 |
低 |
較高 |
較低 |
資料來源:TRI拓墣產業研究所 |
||||
國內ADAS相關廠商
|
系統 |
模組 |
感測器 |
|||||||
|
車道偏離 |
盲點偵測 |
夜視輔助 |
倒車攝影 |
胎壓偵測 |
CCD攝像頭 |
CMOS攝像頭 |
超音波感測器 |
毫米波雷達 |
CMOS |
同致 |
|
|
|
|
● |
|
● |
● |
|
|
車王 |
|
|
|
● |
● |
● |
|
|
|
|
怡利 |
|
|
|
|
● |
|
|
|
|
|
為升 |
|
|
|
|
● |
|
|
|
|
|
經昌 |
● |
|
|
● |
● |
|
|
● |
|
|
永彰 |
● |
|
● |
|
|
|
|
|
|
|
華晶 |
● |
|
|
|
|
|
● |
|
|
|
原相 |
|
|
|
|
|
|
|
|
|
● |
銳相 |
|
|
|
|
|
|
|
|
|
● |
造隆 |
|
● |
|
|
|
|
|
|
● |
|
環隆 |
|
● |
|
|
|
|
|
|
|
|
徽昌 |
|
|
|
|
|
● |
|
● |
|
|
池盈 |
|
|
|
● |
|
● |
|
|
|
|
資料來源:ITIS智網 |
||||||||||